 |
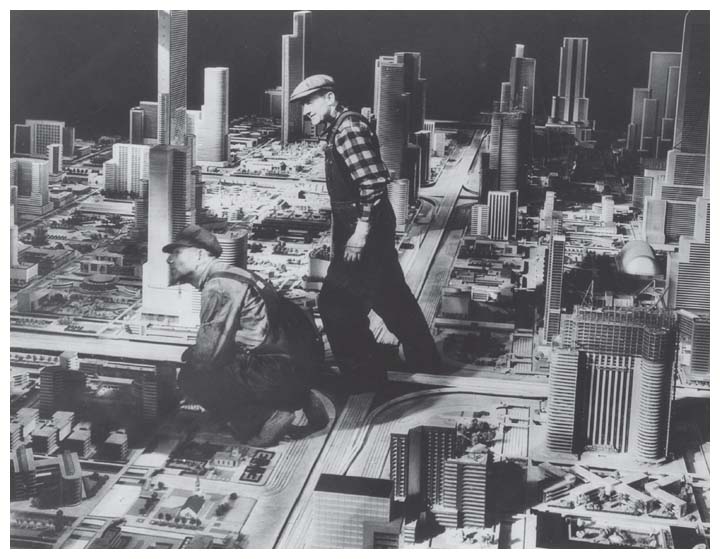
Disabled Chair, 2014 - 2019, prototype #3, Samuel Bianchini with the collaboration of Didier Bouchon "Invisible Man" Exhibition, curating by Murray Horne, Wood Street Galleries, Pittsburgh, April 2019. Photo: © Samuel Bianchini - ADAGP An artwork developed and prototyped as part of the research project “Behavioral Objects” of the Reflective Interaction Group of EnsadLab (laboratory of The École nationale supérieure des Arts Décoratifs - PSL University). |
Joffrey Becker and Käte Hamburger Kolleg Aachen: Cultures of Research (c:o/re)
RWTH Aachen University
c:o/re Workshop: Interdisciplinary Research in Robotics and AI
One-day workshop April 20 2022
To take part online, please register with
events[at]khk.rwth-aachen.de
This workshop addresses interaction design by focusing on the notion of Behavioral Objects. Based on robotics and artificial intelligence, these non-anthropomorphic, non-zoomorphic objects are endowed with capacities for expressive movement, action and reactions and are also able to elicit observers’ behavioral interpretations (intentional and emotional attributions). They are therefore of interest to many fields of research like social sciences, humanities, robotics, computer sciences, art and design. The workshop will address the interdisciplinary framework opened by Behavioral Objects and the experimental perspective that brings together and combines these disciplines.
Program:
12:00-02:00pm
The Apprentices: Objects with Interacting Behaviours
Samuel Bianchini
(Reflective Interaction Research Group/EndsadLab,
École nationale supérieure des Arts Décoratifs, PSL University),
Elena Tosi Brandi
(Xdlab/Art Directions Nods, Orange)
Hugo Scurto
(Inserm-Sorbonne Université and ISIR, CNRS Sorbonne-Université
and Reflective Interaction Research Group)
The Appprentices is a design research project led by multidisciplinary teams from Orange Innovation and EnsadLab (the laboratory of the École des Arts Décoratifs, Paris). Following an experimental approach that combines human sciences (notably anthropology and cognitive sciences), robotics and computer sciences (machine learning) with digital creation and innovation, this project explores new relational modalities between humans and our robotic environments enhanced by artificial intelligence techniques. If our everyday objects might be empowered with abilities of movement and learning, action and reaction, and a behavioral dimension, how can we design new relationships with these robotic artefacts but also between them?
This lunch talk will describe The Appprentices, an instrumental “dispositif” to experiment with such “behavioral objects”, focusing on an original dimension that allows movement and sound to be strongly paired: vibration, vibratory space as a system of communication and interaction. Specifically, the talk will detail the participatory design process that enabled practitioners and researchers from diverse disciplines to collaborate in the prototyping of the dispositif, in an attempt to entangle technical components of these robotic objects with concepts of agency, animacy, learning, and vibration.
05:00 – 07:00pm
Behavioral Objects, Agonistic Objects
How and why to design art robotic objects fighting against and for their being conditions?
Samuel Bianchini
(Reflective Interaction Research Group/EndsadLab,
École nationale supérieure des Arts décoratifs, PSL University)
Created in an artistic context that also belongs to the wider field of robotics, “behavioral objects” are defined by their capacity to express a “personality” thanks to the quality of their movements and their actions and reactions, which are, in this case, regarded as “behaviors.” Non-figurative, these art objects have no need of being useful - their activity does not have a specific function or usage - and they have built-in energy sources that are, generally, not visible, making it impossible to attribute to a third party the energy directly required to make them move, the physical cause of their activity.
If their expressive capacities can be provided through the ability to move and interact dynamically with the environment, what kind of interaction could we design to stimulate the attribution of behaviors and even personality? How to build an emotional and reflective relation with this robotics object through an aesthetic dimension in operation?
Based on the presentation of several art projects developed in the framework of our Behavioral Objects research and creation project, we propose to consider the design of this objects through an agonistic approach. Even in operation, these objects are still in construction: in a kind of new homeostatic perspective, they are always seeking for their balance. They need to fight for that, against and for their being conditions. Exhibited such objects it is to exhibit this fight. It requires now to configure relations of forces, internal as with the environment. This new kind of settings as to consider aesthetic, symbolic and technical dimensions gathered in real-time operation. It raises the possibility of an agonistic design, a way to set conditions for a sensitive and reflective experience for objects and humans.